Numerical Technique for Autonomous Path Searching in Designated Scene with Rotated AOR 9-Point Laplacian Iteration
DOI:
https://doi.org/10.37934/cjcst.2.1.4455Keywords:
Mobile robot path searching, collision free, nine-point Laplace operator, rotated iterationAbstract
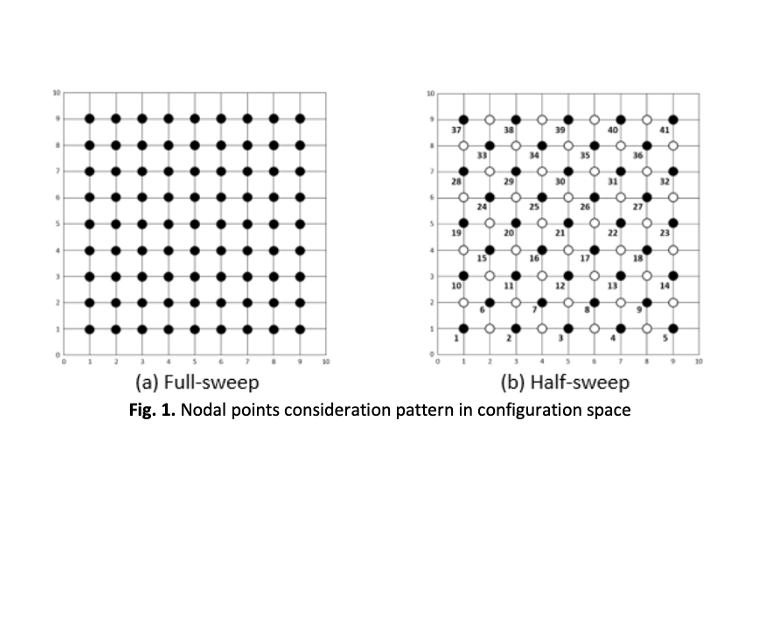
Autonomous navigation is a field that has been under constant research throughout recent years as human yearns to develop better path searching ability for autonomous navigation. Up until now, there has been much advancement on the subject matter, however there are much room for improvement that yields better result thus pushing the limits of autonomous navigation ability further. In this study, we will attempt to improve the path searching efficiency of mobile robot by using numerical technique to solve path searching problems iteratively. By utilizing harmonic functions, the Laplace’s equation can be used to generate potential function values for mobile robot’s configuration space. Thus, this paper proposed the method of Half-Sweep Accelerated Overrelaxation 9-Point Laplacian (HSAOR-9P) iteration to improve the path searching ability of mobile robot in a configuration space. Through this, the experiment shows that a smooth path was able to be produced from any starting point to the goal point in the configuration space. Aside from that, the results also show that this numerical method was more efficient in solving mobile robot path searching problem compared to its predecessors.
Downloads
Published
How to Cite
Issue
Section